Principal Investigator
Liang Li
I am a group leader (PI) at the Max Planck Institute of Animal Behavior and the University of Konstanz, Germany. I study collective motion in fish school by artificial tools, including robotic fish and virtual reality techniques. During my Ph. D, I focused on design, control, modeling and optimizing of carangiform robotic fish. Based on the robotic fish platform, energy saving mechanism in collective motion in fish school was systematically explored in both spatial and time scales. I will continue to test this hypothesis in the real fish system and explore further mechanisms in collective motion in fish school by projecting controllable virtual fish.
PostDocs

Udoy Sankar Basak
I am investigating the collective movement of locusts using individual tracking of agents and incorporating information theory to infer different causal interactions that constitute the collective migration of locusts. In another approach, I also use the Eulerian framework, specifically Particle Image Velocimetry (PIV), to describe the macroscopic flow patterns in locust swarms. By combining causality analysis from information theory with PIV-based flow characterization, I aim to uncover the underlying principles governing active turbulence in collective migration.
PhD Students

Ruiheng Wu
Ruiheng is interested in developing and applying computer science technologies to study animal behavior. During his Ph.D. training, he will mainly focus on developing the next generation of VR for fish. (Co-supervised with Oliver Deussen and Iain Couzin)

Hun Jang
Bioinspired robotics and soft robots. (Co-supervised with Iain Couzin)
Master Students

Jonathan Häßler
Jonathan is working on 3D fish eye tracking using multiple cameras.

Jannik Wirtheim
Jannik is working on inverse reinforcement learning to understand predator-prey interactions.
Undergraduate Students

Bhargavsinh Solanki
Bhargavsinh is working on bioinspired geometric decision-making with drones.
Alumni / Former Members

Liming Chao
Dr. Chao is interested in the interdisciplinary field between animal behavior and flow dynamics. Based on numerical and experimental experiments, he wants to understand how individuals transfer information to their local neighbors by controlling and sensing hydrodynamics to make movement decisions within a group.

Siyuan Wang
Siyuan Wang is interested in underwater robots and bionic sensing. He mainly focuses on the design, control, modeling, and optimization of microrobots for fish behavior studies. (Co-supervised with Prof. Minyi Xu)
Collaborators

Iain D. Couzin
Iain Couzin is Director of the Max Planck Institute of Animal Behavior, Department of Collective Behaviour, and the Chair of Biodiversity and Collective Behaviour at the University of Konstanz, Germany. We are working on collective animal behavior using real and virtual robotics.

Daniel Calovi
Daniel has a background in physics but over the years studied many types of collectives at multiple levels (amoebae, fish, lymphocytes, and termites). We are collaborating to study collective behavior using a virtual reality system at Konstanz.

Guangming Xie
Prof. Xie is a professor at Peking University. He is interested in bio-inspired robotics, multi-agent systems, etc. We are working on bio-inspired robotics.

Heiko Hamann
Heiko Hamann is a professor at the University of Konstanz.

Oliver Deussen
Oliver Deussen is a professor at the University of Konstanz.
Andreagiovanni Reina
Andreagiovanni Reina is a Group Leader at the University of Konstanz.
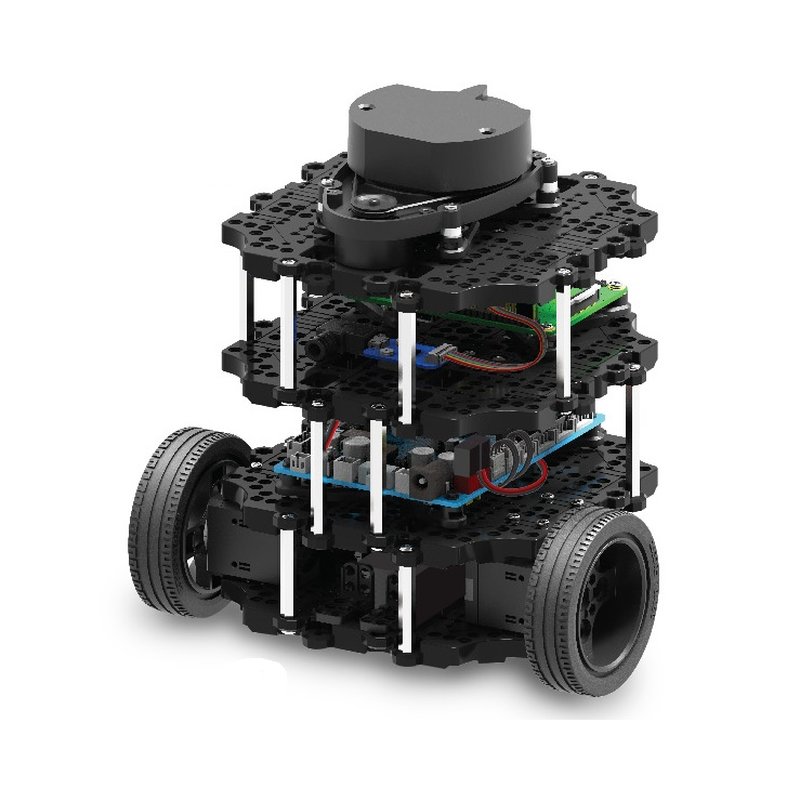
Turtlebot x 2
Turtlebot is one of our robotic platforms to test sensory-motor control in collectives.

Jetbot
JetBot is a robot platform for education and vision-based control platform.

Freenove 4WD Smart Car for Raspberry Pi x 21
Freenove robot platform is mainly for education and one member of swarm robots.

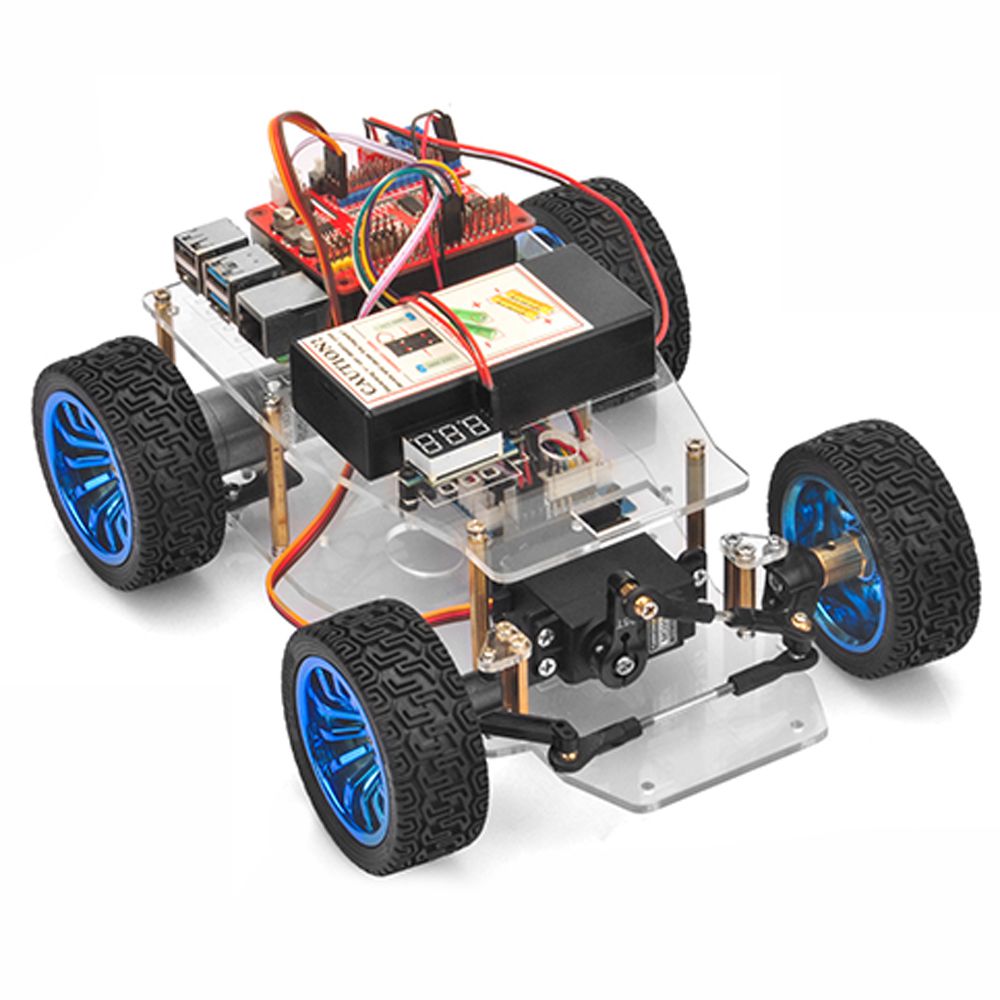
Raspberry Pi Ai Car Kit (PiCar-X) x 7
PiCar is another platform for education and swarm robots.
osoyoo Raspberry Pi Robot Car x 100
Osoyoo Raspberry Pi is our new swarm robot platform.